论文
《Monocular Visual Odometry Initialization with Points and Line Segments》(2019IEEEAccess, National University of Defense Technology, China)
Open Source
None.
BackGround
SLAM/VO系统的初始化问题可以看作是一个特殊的SFM(Structure From Motion)问题:即在较小的运动过程中恢复三维结构,近期SfSM(Structure from Small/accidental Motion)被提出,SfSM关注短基线运动下的结构恢复,同时SfSM不只使用两帧数据。
SLAM/VO中的初始化过程
目前在SLAM/VO中常用的初始化方法可以分为矩阵分解和随机深度初始化两类:
- 随机深度初始化:将第一帧像素点的深度初始化为一个随机产生的值(一个方差很大的分布),通过之后多个关键帧的观测来将这个随机深度值约束到一个收敛值。使用这一方法的相关论文:
- 《Lsd-slam: Large-scale direct monoc- ular slam》(2014ECCV)
- 《Dpptam: Dense piecewise planar tracking and mapping from a monocular sequence》(2015IROS)
- 矩阵分解:包括本质矩阵分解和单应矩阵分解两类,其中后者假设场景是一个共面的二维场景(DTAM和SVO使用这一方法),ORB-SLAM2同时使用了这两个分解方法,最后使用一个阈值来判断使用哪一个方法的结果。使用本质矩阵分解的论文:
- 《Dt-slam: Deferred triangulation for robust slam》(2014 3DV)
- 在2004年《多视几何》中,基于两帧的重建描述为以下三个步骤:
- 从二维点匹配对中计算基础矩阵;
- 基于基础矩阵计算相机矩阵;
- 对于每一个点匹配对,计算三维点。
SfSM相关的研究
- 《A closed-form solution to rotation estimation for structure from small motion》(IEEE Signal Processing Letters 2017);[32]
- 《High quality structure from small motion for rolling shutter cameras》(ICCV2015);[29]
- 《High-quality depth from uncalibrated small motion clip》(CVPR2016)[28]
已有的这些SfSM的工作都是基于点特征的,虽然线特征在人造场景中很常见,但是线特征存在较为严重的退化(degeneracy)问题,尤其是在短基线运动的场景下。
一般在SfSM相关研究中,存在两个假设:
- 相比于场景的深度值,相机的平移运动是足够小的;
- 能够使用一阶泰勒展开来近似表示相机运动中的旋转矩阵。
第二个假设的数学表达: $i$-th相机的旋转矩阵可以近似表达为:
\[R_i=I_3+[r_i]_{\times}=\begin{pmatrix} 1 & -r_i^z & r_i^y \\ r_i^z & 1 & -r_i^x \\ -r_i^y & r_i^x & 1 \end{pmatrix}\]其中 $\lbrack r_i \rbrack_{\times}$表示旋转向量 $r_i=(r_i^x,r_i^y,r_i^z)$的斜对称矩阵。虽然此处:
\[R_{i}R_i^T \neq I_3\]但在微小运动的情况下可以使用。来自论文《3d reconstruction from accidental motion》(2014CVPR)[31]。
线特征重建的退化问题
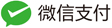
在2004《多视几何》中对这一问题的描述:
Degeneracy. As illustrated in figure 12.8 lines in 3-space lying on epipolar planes cannot be determined from their images in two views. Such lines intersect the cam- era baseline. In practice, when there is measurement error, lines which are close to intersecting the baseline can be poorly localized in a reconstruction. The degeneracy for lines is far more severe than for points: in the case of points there is a one-parameter family of points on the baseline which cannot be recovered. For lines there is a three-parameter family: one parameter for position on the baseline, and the other two for the star of lines through each point on the baseline.
在实际操作中,靠近极线的线段重建时,错误的线段匹配也可能计算出很小的投影误差。三维直线的重建退化问题比点严重,因为只有一类点无法重建:和极点重合的,但是对于线来说却有多种不能重建的情况(在对极平面以内的都不能重建),即one-parameter family of points和three-parameter family of lines不能重建。
线特征重建退化问题的解决方案
- 当线段靠近极线时使用人工构造的点来辅助进行三维线段重建,相关论文:
- 《Accurate reconstruction of near-epipolar line segments from stereo aerial images》(2012 PFG)[33]
- 《Visual localization with lines》(2017 PHD dissertation, University of Heidelberg)[34]
- 使用重建线段到基线的距离来剔除退化情况,相关论文:
- 《3d surface reconstruction from point-and-line cloud》(2015 3DV)[35]
Motivation
- 线特征在人造场景中较为丰富,已经被一些学者用到了SLAM/VO中。
- SLAM/VO的初始化是一个基于短基线运动的SFM问题,在短基线运动中,图像内容更容易受旋转运动影响而变化(而非平移运动),而旋转运动与线特征之间存在紧密的关联。
- 线特征初始化目前存在相对点特征更为严重的退化问题。
- 目前已经有一些SfSM领域的工作,它们致力于解决短基线运动情况下的重建工作,这是可以借鉴到SLAM/VO初始化过程的。
Contribution
- 提出了一个联合点线特征的初始化算法;
- 提出了一个在短基线运动中基于线特征的旋转分析算法,形式:闭式表达式(closed-form expression);
- 提出了一个经过数学证明的退化线段剔除标准。
Content
主要流程
- 获取初始化所需的帧队列,以及其中的点线特征匹配对,这其中的主要工作在于线特征匹配;
- 使用线特征匹配对计算各帧与参考帧之间的旋转矩阵。
- 使用基于Plucker表示的三维线特征的约束来优化第二步得到的旋转矩阵;
- 固定旋转矩阵,联合点线的投影误差函数来优化平移向量及三维特征深度信息。
- 联合优化旋转矩阵(近似表达形式)、平移向量等参数。
- 丢弃之前使用的旋转矩阵的近似表示,联合优化旋转矩阵、平移向量等参数。
1.特征跟踪及初始化帧的选择
点特征
使用跟踪点视差中值(The disparity medians of the point features tracked between the new frame and all frames)。
设置两个阈值: $\tau_{dmin}$ 和 $\tau_{dmax}$,当当前帧与参考帧之间的跟踪点视差中值超过 $\tau_{dmin}$ 时,将当前帧加入初始化帧序列,如果超过了 $\tau_{dmax}$,并且存在帧队列中存在超过三帧以上的帧,将当前帧加入初始化帧序列并开始初始化。如果 $\tau_{dmin}$ 越小,或者 $\tau_{dmax}$ 越大,则跟踪点越少、队列中的帧越多。
线特征
使用三个约束来完成线特征匹配/跟踪:
- 几何约束:其中$a$、$b$、$c$分别为两个跟踪线段之间端点的距离以及原线段本身的长度,此处使用光流跟踪线段端点。 \(\begin{equation} s_g = \begin{cases} 1-4ab/c^2,& a/c\leqslant0.25 \&\& b/c\leqslant0.25; \\ 0,& a/c>0.25 \&\& b/c>0.25. \end{cases} \end{equation}\)
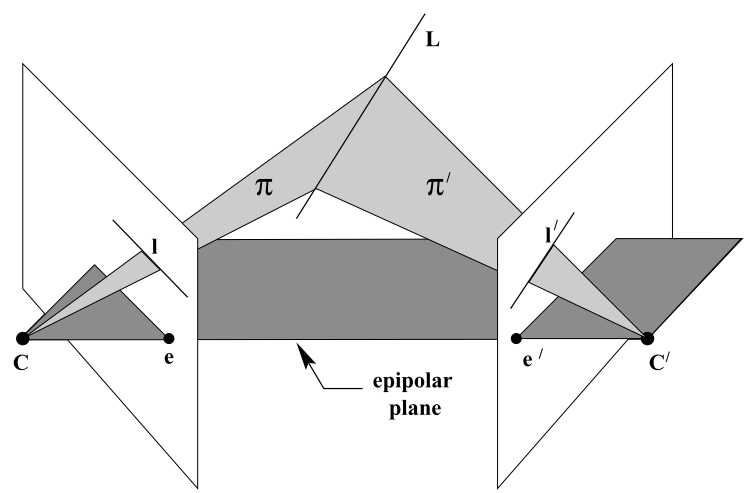
- 对极约束:其中蓝色线段为当前帧内二维线段所在直线,虚线为参考帧中对应线段端点的极线。
- \[s_e=\frac{AB}{CD}\]
- 描述子距离:使用LBD描述子,计算两条线段描述子之间的汉明距离。 \(\begin{equation} s_d = \begin{cases} 1,& d_H(D_r,D_c)< \tau_{des}; \\ 0,& d_H(D_r,D_c)\geqslant \tau_{des}. \end{cases} \end{equation}\)
最终分数为 $s=s_gs_es_d$
2.基于线特征匹配对的旋转分析
使用的约束:三维线段的端点投影到当前帧,得到两个二维点,当前帧内与该三维线段匹配的二维线段所在的直线为$l$,这两个点在$l$上。
- 三维线段的投影。使用端点投影:$x_{rep}^s=\pi(R_{i}x_{0k}/\omega_{ks}+t_i)$,其中 $\pi$表示将二维点坐标表示为三维齐次坐标,$\omega$表示点的反向深度;
- 由二维线段的两个端点得到共线直线:$l_{ik}=x_{ik}^s \times x_{ik}^e=(a_{ik},b_{ik},c_{ik})$;
- 共线约束:$l_{ik}^Tx_{rep}^s=0$
最终得到的目标函数公式: \(Ar_i^x+Br_i^y+Cr_i^z+D=0\)
计算可得:$A,B,C,D$四个参数中,仅有参数D包含平移向量$t_i$和反向深度 $\omega_{ks}$,但由于是微小运动(参见前面的假设),此处可近似地丢弃平移向量和反向深度项: \(D=l_{ik}^T(x_{0k}^s+ \omega_{ks}t_i)\) \(D\approx l_{ik}^Tx_{0k}^s\)
使用上述目标函数公式,利用SVD分解和RANSAC算法来求出旋转矩阵的三个参数 $(r_i^x,r_i^y,r_i^z)$。
3.旋转矩阵的优化
使用Plucker坐标表示三维线段 $(m_{ik},d_{ik})$,其中参数分别为线矩和线方向,线方向的长度为1一个单位长度。可得以下约束(其中$n_k^i$是一个与$m_{ik}$ 同向的向量,可以由二维线段的两个端点计算得到): \((R_id_{0k})^Tn_k^i=0\)
最小化以上函数可以同时优化旋转矩阵和三维直线Plucker坐标中的线方向$d_{ik}$。
4.固定旋转矩阵,联合优化平移向量、特征反向深度和三维线段参数
联合点线特征的投影误差,优化标题中的变量。其中点特征误差为投影点与匹配点的距离,线特征误差为投影端点与匹配线段所在直线的点线距离。
5.联合优化旋转矩阵、平移向量、特征反向深度和三维线段参数
联合优化标题中的变量。其中旋转矩阵为前述近似表示形式。
6.联合优化旋转矩阵、平移向量、特征反向深度和三维线段参数
联合优化标题中的变量。其中旋转矩阵为$SO(3)$形式。作者此处说明:
$R_i$ is orthogonalized and scaled to initialize $R_{ic}$
但不太清楚具体怎样初始化这个$SO(3)$形式的$R_{ic}$。
Experiments
作者使用了ICL-NUIM数据集(一个人造数据集,包含相机位姿和环境点云的Ground Truth)和实地运行两个测试方案。
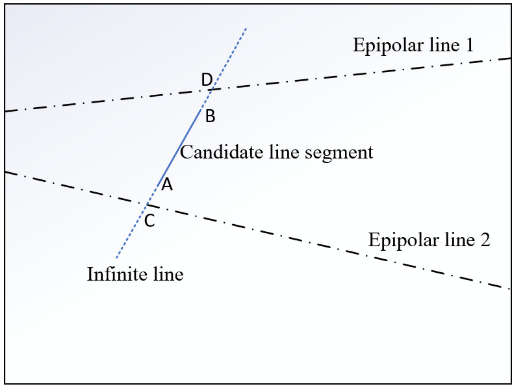
位姿精度(其中平移向量只算角度误差,因为尺度未知)
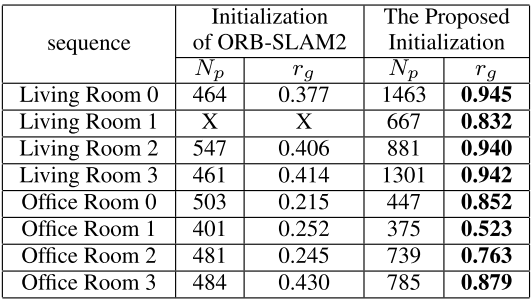
建图精度(其中$N_p$为5次运行生成的三维点数目,$r_g$为好的三维特征的比例)
Conclusion
这份工作主要是对论文《A closed-form solution to rotation estimation for structure from small motion》(2017 SPL)的一个扩展。个人觉得属于琐碎、难以验证的创新,这类工作中可能一到两个细节就会决定整个方案的性能,而没有公布开源代码的情况下很难follow。
不过文章中线特征匹配的方法感觉有一定借鉴意义,三重约束可能会提高匹配的准确性,对于地图重建和位姿计算方面,其中的部分公式推导的工作量感觉不算小。
转载请注明原地址,魏鑫燏的博客: http://slowlythinking.github.io 谢谢!