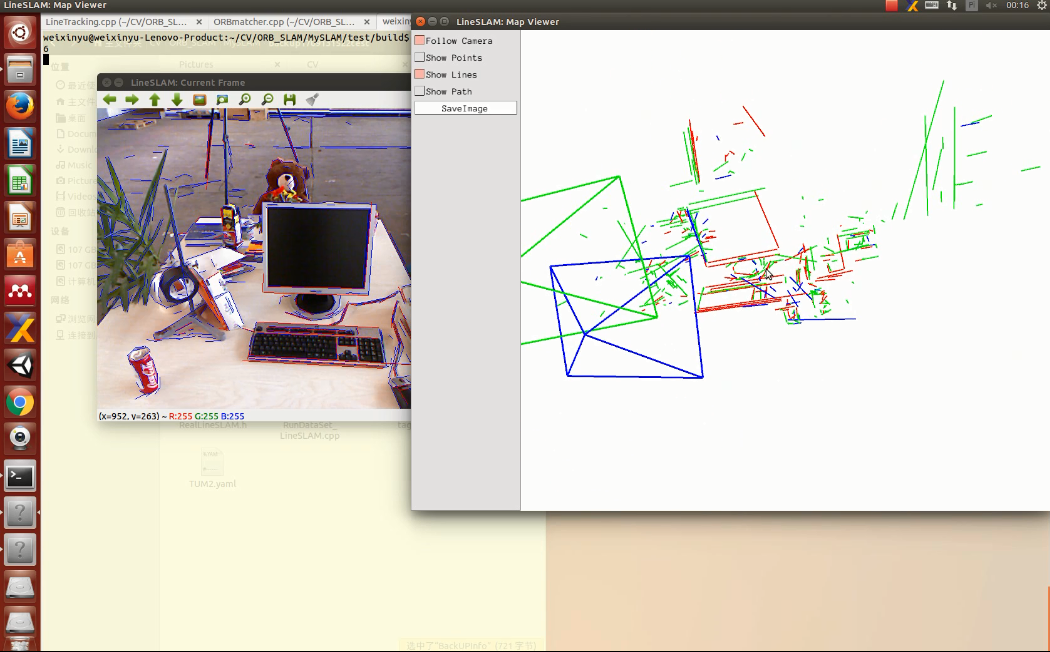
目前的主要工作是构建一个仅基于线特征的SLAM系统,基于此再扩展至点线结合、线+IMU结合等SLAM系统,以此提高目前SLAM系统在光照变化、纹理稀疏场景下的鲁棒性,目前系统基本完成,运行截图如下(由于成果尚未总结完成,细节稍后详叙):
转载请注明原地址,魏鑫燏的博客:http://slowlythinking.github.io 谢谢!
 | 阅读: 次
| 阅读: 次
目前的主要工作是构建一个仅基于线特征的SLAM系统,基于此再扩展至点线结合、线+IMU结合等SLAM系统,以此提高目前SLAM系统在光照变化、纹理稀疏场景下的鲁棒性,目前系统基本完成,运行截图如下(由于成果尚未总结完成,细节稍后详叙):
转载请注明原地址,魏鑫燏的博客:http://slowlythinking.github.io 谢谢!

感谢您的支持,我会继续努力!



打扫码打赏,请量力而行